软件与驱动打包带走,包括USBCAN-2E-U 的读取软件CANtest与与驱动安装说明,软件包,驱动软件,适用于汽车程序刷写,测试,can总线报文信息读取
”汽车 can报文读取 软件安装 驱动安装“ 的搜索结果
Qt CAN编程1- CAN总线整体介绍 - 简书STM32---CAN2.0B读取新能源汽车BMS报文-程序员宅基地CAN通信标准帧和扩展帧介绍_can扩展帧-程序员宅基地【精选】详解CAN 2.0协议_can2.0-程序员宅基地QT实现CAN通信_五个板栗的技术博客_51...
CAN2.0BCAN的简单概述 CAN-BUS即CAN总线技术,全称为“控制器局域网总线技术(Controller Area Network-BUS)”。Can-Bus总线技术最早被用于飞机、坦克等武器电子系统的通讯联络上。将这种技术用于民用汽车最早起源...
由于个人项目需要对电池管理系统进行仿真测试,需要将Peak-Can上的报文发送至Simulink接收进行处理,发现网上没有很完整的教程,自己查阅资料摸索出来后供大家参考!

一、下载并安装Kvaser Linux Driver和SDK$ cd ~$ # We need tools for building (gcc compiler, make, etc)$ sudo apt install build-essential$ # Download latest version of linuxcan, Kvaser Linux Driver and ...
该接口的作用是从底层的CAN驱动中读取CAN报文数据。它的函数原型如下: Std_ReturnType CanIf_ReadRxPduData(PduIdType CanIfRxPduId, P2VAR(PduInfoType, AUTOMATIC, CANIF_APPL_DATA) CanIfRxPduPtr) 其中,...
首先研究CAN总线和SAE J1939协议,提出一种基于MC9S12HZ256微控制器的总线式汽车数字仪表解决方案。...软件设计部分编程实现了对CAN总线和各传感器数据的读取、处理。该系统能够实时反映车辆工况。

软件与驱动打包带走,包括USBCAN-2E-U 的读取软件CANtest与与驱动安装说明,软件包,驱动软件,适用于汽车程序刷写,测试,can总线报文信息读取 相关下载链接://download.csdn.net/download/qq_42440265/13710068?...


经过多次尝试和分析,得出的结论是,修改CANIF缓冲的尺寸并重新分配报文给各个buffer并不能解决问题。此外,发送中断被抢占可能导致报文无法发送,最终也将此因素排除。本文档还提到了一些可能导致发送流程调度出现...
官方是给出了Android 驱动ch340的jar ,我们只需要下载如何放到lib下面,然后使用它。 下载链接 之后就是包的使用了 使用它我们是用的usb口子,还要手机硬件支持otg 或者usb host 。如何看手机支持不支持这个 在包...
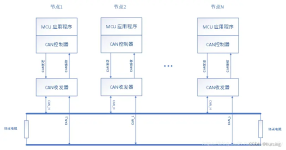
前面的文章已经介绍过基础软件的CAN通信部分,今天整理下CAN通信的概览知识。从几个概念开始。 1 位速率 位速率(bit rate),即传输期间单位时间的位数。 数字信号系统中,带宽用来标识通讯线路所能传送数据的能力...
#PCANBasic.py##~~~~~~~~~~~~##PCAN-Basic API##~~~~~~~~~~~~##------------------------------------------------------------------#Author : Keneth Wagner##Language: Python 2.7#-------------...
CAN_H&CAN_L是CAN的通讯线,基于差分信号组成,以确保数据的准确性。其中通讯的电缆线最好双绞。CAN_H&CAN_L的低电平时逻辑1,高电平时逻辑0,该信号标准和串口有所区别。电压差为2V时,显性电平,表示逻辑0电压差为...
### 回答1: Python 是一种高级编程语言,可用于许多不同的应用程序开发。...通过使用Python中的peak库,可以方便地控制CAN总线,并实现CAN报文的发送和接收,从而用于各种汽车电子控制、嵌入式系统开发和测试等领域。


乎都搭载了智能网联终端,预计 2025 年之前大部分新车都将接...告》中梳理了汽车网络安全的发展趋势,包括本年度备受关注的汽车安全攻击事。展直接将汽车以太网接入到互联网中,目前大部分汽车缺乏异常检测、主动反制。
3.2 Linux中CAN驱动程序实现针对MCP2515控制器,在Linux kernel设计中采用字符设备驱动开发的形式。驱动初始化函数staticint_init MCP2515_init(),首先通过ioremap()函数将S5PV210的SPI寄存器的物理地址映射到内核...



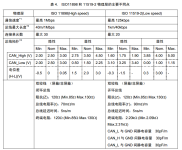
UDS的CAN刷新软件http://www.gzweix.com/article/sort0253/sort0487/info-260414_3.html1. UDS相关服务 ISO 14229用于刷新方面的主要诊断服务见表1。 根据ISO 14229协议的诊断服务及ISO 15765-3的通信建议, 刷新...
最近在使用can总线,由于这个以前接触的比较少,所以调试代码的时候直接是下载的正点原子的例程,在这个基础上修改调试的。现在将调试中遇到的问题,总结一下,避免以后踩坑。目前写了一个查询方式的,一个中断方式...
使用Kvaser公司的库文件中的函数进行DBC文件的读取和CAN报文解析的步骤如下: 1. 首先,你需要安装 Kvaser 公司的驱动和库文件,并在你的项目中引入库文件和头文件。 2. 读取 DBC 文件:使用 CANdbAPI.h 中的函数...
推荐文章
- withRouter,非根组件获取路由参数_withrouter 只能取到路由中的一个参数-程序员宅基地
- ubuntu环境下QT5操作摄像头报错,cannot find -lpulse-mainloop-glib cannot find -lpulse cannot find -lglib-2.0_cannot find–lpulse-程序员宅基地
- 用jbpm_bpel学jwsdp的ant方式使用-程序员宅基地
- 输入数字判断星期几_html获取当前星期几-程序员宅基地
- SpringBoot整合Activiti7——实战之放假流程(会签)_activit7中会签-程序员宅基地
- 阿里云服务器收到挖矿病毒的攻击,导致基础的文件被病毒污染的问题和对应的处理解决方法-程序员宅基地
- 北京东城区空调维修办法,格力变频空调出现ph,到底是怎么回事?_格力变频空调ph代码-程序员宅基地
- vscode编辑器使用拓展插件background添加背景图片改变外观_background vscode-程序员宅基地
- android 简单打电话程序_android拨打电话的程序-程序员宅基地
- 第二届中国(泰州)国际装备高层次人才创新创业大赛_泰州市双创人才计划2022-程序员宅基地